Kubic作为一款经典三维空间解谜游戏,其第十一关因需要同时处理多层嵌套结构与动态旋转逻辑,常令玩家陷入僵局。将该关卡的核心机制,结合分步操作流程与空间思维技巧,帮助玩家系统性突破难点。
关卡目标与结构分析
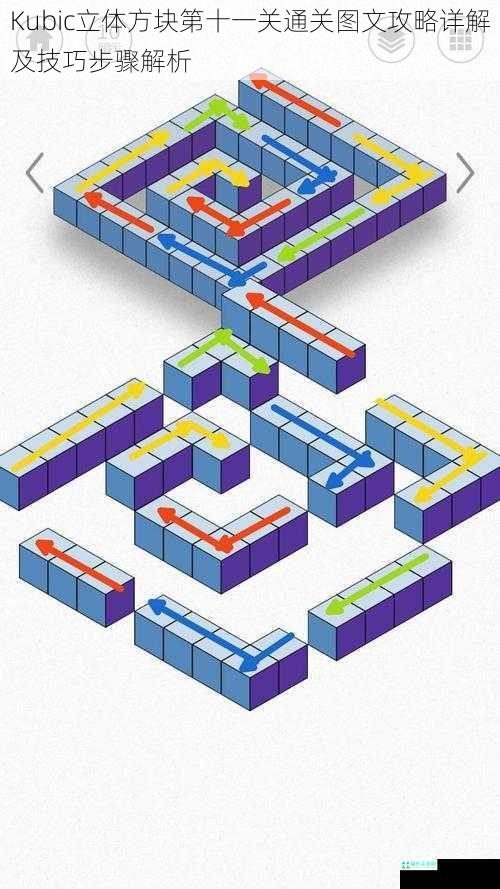
第十一关需在4×4×4的立体框架内,通过旋转与平移操作,将散落的7个异形模块(含L型、T型及Z型变体)组合为完整立方体。核心难点在于:
1. 模块干涉效应:紫色Z型模块的直角延伸部分易与黄色L型模块形成空间重叠。
2. 动态对称平衡:红色T型模块需同时满足横向支撑与纵向锁定功能。
3. 轴向操作陷阱:玩家需掌握X/Y/Z三轴联动旋转机制,避免视觉误判。
分步操作流程解析
第一阶段:基础框架搭建(底层)
1. 定位基准模块
将蓝色直线型模块沿Z轴纵向放置于底层中心线(坐标X2,Y2,Z0),作为后续模块的定位基准。此时模块占据坐标范围X2,Y0-3,Z0。
2. 构建十字支撑结构
选取橙色十字模块,通过两次顺时针Y轴旋转使其呈现横向展开形态,将中心点对齐蓝色模块末端(X2,Y3,Z0)。该模块将覆盖X1-3,Y3,Z0至X1-3,Y3,Z1区域,形成底层十字交叉结构。
第二阶段:中层动态平衡(第1-2层过渡)
3. 嵌入红色T型模块
在Y轴正方向视角下,将红色模块旋转至T型开口朝左的状态。缓慢提升至Z=1高度后,沿X轴负方向平移至X0,Y1,Z1位置。此时模块左翼需插入底层橙色模块缝隙(验证标准:X0,Y1,Z1与X0,Y1,Z0无碰撞)。
4. 紫色Z型模块定位技巧
对紫色模块进行三次逆时针X轴旋转,形成镜像Z字结构。将其嵌入X1,Y0,Z1至X3,Y0,Z3区间,需确保模块拐角处(X3,Y0,Z3)悬空不接触顶层边界。此步骤需通过俯视视角(Z轴视角)校准位置。
第三阶段:顶层封闭与校验(第3层)
5. 黄色L型模块立体嵌入
激活模块的三维旋转模式,通过交替切换Y轴与Z轴旋转角度,使L型短边朝向X轴正方向。最终定位点为X3,Y2,Z2,长边沿Z轴延伸至X3,Y2,Z3,短边覆盖X3,Y3,Z2。
6. 绿色斜角模块校正
该模块需经历两次特殊操作:
最终嵌入X0,Y0,Z2至X2,Y0,Z3区域,与紫色模块形成45°斜角咬合。
核心技巧与容错机制
1. 动态坐标系校准法
每次旋转操作后,建议通过以下流程重建空间坐标系:
2. 冲突预判与回溯策略
当出现模块无法就位时,按优先级执行以下检查:
1. 验证前序模块是否发生轴向偏移(误差阈值≤0.2单位长度)
2. 检测当前模块旋转次数是否超过系统限制(单模块最大旋转次数为3次)
3. 使用"层级隔离法":隐藏已完成层级的模块,单独调试问题模块的运动轨迹
3. 空间记忆强化训练
建议通过"三色标记法"提升操作精度:
典型错误案例解析
案例1:紫色模块Z轴穿透
*现象*:模块伸出立方体边界
*成因*:未在Z=1高度进行预旋转操作
*解决方案*:在Z=0层完成紫色模块的90°X轴旋转后再提升高度
案例2:红色T型模块失稳
*现象*:模块在Z=1层晃动
*成因*:底层橙色模块Y轴坐标偏移
*修正流程*:
1. 解除红色模块锁定
2. 将橙色模块沿X轴正方向移动0.5单位
3. 重新嵌入红色模块并执行二次校准
进阶优化策略
1. 动量守恒操作法:连续旋转两个关联模块时,保持旋转方向一致性(均顺时针或逆时针)可减少系统计算误差。
2. 量子化定位原则:所有平移操作以0.5单位长度为最小步进值,避免出现非整数坐标。
3. 热力学平衡验证:当模块组合完成后,轻微晃动设备观察结构稳定性,理想状态下应无任何模块位移。
通过上述方法论指导,玩家可系统化攻克第十一关,并为后续高阶关卡积累三维空间操作范式。建议每完成一个阶段后保存进度,逐步构建肌肉记忆与空间直觉。






